
von Frank Tofahrn
Wie viele Anlagen gehen eigentlich gleichzeitig?
Es ist ja immer wieder die spannende Frage:
Zu diesem Thema hat es seitens einiger Hersteller praktische Versuche gegeben. Ferner hat die praktische Erfahrung auf Flugveranstaltungen mit einer hohen Anzahl Piloten gezeigt, dass viele Anlagen gleichzeitig betrieben werden können. Diese eher phänomenologischen Ergebnisse zeigen aber nicht die Grenze auf, ab der es kritisch werden kann. Der folgende Beitrag ist der Versuch, eine qualitative Betrachtung der Grenzen des gleichzeitigen Betriebes vieler R/C-Anlagen zu liefern. Eine quantitative Antwort in der Form: „Es gehen X Anlagen gleichzeitig“ kann auch hier nicht gegeben werden, da eine dahingehende Simulation extrem aufwändig wäre und auch nicht alle denkbaren Situationen berücksichtigen könnte und somit auch unter diesem Aspekt immer unvollständig bliebe.
Ungeachtet dessen kann man sich aber mal Gedanken über qualitative Trends der gleichzeitigen Nutzbarkeit von R/C-Systemen in Abhängigkeit von der Anzahl der Anlagen und der Anzahl der genutzten Frequenzen machen. Dazu dient die im Folgenden dargestellte Betrachtung.
Zunächst die Randbedingungen, die man kennen muss, um die Ergebnisse richtig zu interpretieren:
Im Betrieb müssen sich die einzelnen Anlagen voneinander unterscheiden lassen. Die Unterscheidung erfolgt hauptsächlich in drei Bereichen:
Die Unterscheidung in der Frequency-Domain erfolgt dadurch, dass nicht alle auf der gleichen Frequenz senden. Die Unterscheidung in der Time-Domain erfolgt, indem nicht alle zur gleichen Zeit senden. Damit es zu einer Kollision zwischen 2 oder mehr Systemen kommt, müssen diese also zur gleichen Zeit auf der gleichen Frequenz senden. Da die R/C-Systeme nicht untereinander synchronisiert sind, wie z. B. DECT oder GSM, besteht jederzeit die Möglichkeit, dass solche Kollisionen auftreten. Die Unterscheidung in der Code-Domain ist bei den gängigen R/C-Systemen im Vergleich zur Time- oder Frequency-Domain relativ schwach ausgeprägt. Mehr dazu weiter unten.
Interessant ist die Antwort auf die Frage:
• Wie wahrscheinlich ist eine solche Kollision?
Bereits zu 35-MHz Zeiten gab es die Unterscheidung nach Zeit und Frequenz (gleiche Frequenz > nicht gleichzeitig fliegen, gleichzeitig fliegen > keine gleiche Frequenz). Wenn dann aber so ein Vollpfosten dabei ist, der selbst nach 20 Jahren Modellflug das Konzept der Frequenztafel nicht verstanden hat und anwenden kann, ist die Wahrscheinlichkeit einer Kollision der Funksysteme hoch.
Bei modernen 2.4 GHz-Systemen ist der Störfaktor zwischen den Ohren ausgeschaltet, da der Benutzer hier weder Einfluss auf die Sendefrequenz noch auf die Sendezeitpunkte hat. Das entscheidet die Elektronik. Im Normalfall steht für diese Entscheidung aber keine Information über das aktuelle Funkumfeld zur Verfügung, so dass hier nach mehr oder weniger starren Schemata gearbeitet werden muss, die Kollisionen nicht verhindern können. Das wird sich in Zukunft allerdings ändern.
Um die Frage nach der Kollisionswahrscheinlichkeit zumindest qualitativ beantworten zu können, müssen drei Fragen beantwortet werden:
a. Wie wahrscheinlich ist es, dass sich zwei oder mehr Systeme gleichzeitig auf einer Frequenz befinden?
b. Wie wahrscheinlich ist es, dass zwei oder mehr Systeme gleichzeitig senden?
c. Wie wahrscheinlich ist es, dass die Fälle a. und b. gleichzeitig eintreten?
Für die Antworten auf die Frage a. und b. sind folgende Voraussetzungen angenommen:

Wie aus dem Plot ersichtlich, ist die Wahrscheinlichkeit bei einer geringen Anzahl von Usern gering. Ebenso trägt eine hohe Anzahl von Hoppingfrequenzen dazu bei, die Wahrscheinlichkeit zu reduzieren. Bei nur 2 Usern (das ist die vordere Kante des Diagramms), also 2 gleichzeitig betriebenen Anlagen, wäre man mit 10 Frequenzen schon ganz gut bedient. Eine Erhöhung der Anzahl der Frequenzen bringt hier nur noch marginale Vorteile. Steigt bei 2 Frequenzen die Anzahl der User auf 8, ist man schon in dem Bereich, in dem die Anzahl der potentiellen Kollisionen kritisch werden kann. Nutzt das System 80 Frequenzen, was z. Z. das aus regulativen Gründen nutzbare Maximum darstellt, sieht die Situation schon freundlicher aus. Die Quintessenz aus dieser Betrachtung ist eine gar einfache und kommt nicht völlig überraschend:
Allerdings ist das nicht die ganze Story. Es fehlt noch die Antwort auf die Frage b.
Typischerweise senden Frequency-Hopper nur einen Bruchteil der Zeit, die sie auf einer Frequenz verbringen. Das bedeutet, dass obwohl 2 oder mehr Systeme zur gleichen Zeit auf der gleichen Frequenz sind, diese Frequenz für einen Teil der Zeit störungsfrei genutzt werden kann, obwohl andere Systeme die Frequenz dadurch belegen, dass sie dort „parken“.
Bei der bisherigen Betrachtung weiter oben wurde die Wahrscheinlichkeit betrachtet, dass 2 oder mehr Systeme zur gleichen Zeit auf der gleichen Frequenz rumlungern, unabhängig davon, ob sie gerade senden oder Däumchen drehen. Will man jetzt noch die Däumchendrehzeit in die Betrachtung mit einbeziehen, muss eine zusätzliche Betrachtung angestellt werden.
Es geht um das unendliche Thema: „Unkoordinierter Vielfachzugriff auf die Resource Frequenzspektrum“. R/C-Anlagen arbeiten hier typischerweise nach dem ALOHA-Verfahren (vollkommen richtig, das kommt aus Hawai). Da es jetzt etwas aufwändig wäre, alle aktuellen Systeme hinsichtlich ihres Verhaltens in einem ALOHA-Umfeld gegeneinander zu prüfen, wurde aus den Betriebsparametern einiger aktueller Systeme ein „Durchschnitts-System“ gebildet, das zur weiteren Betrachtung herangezogen werden soll. Berechnet wird die Wahrscheinichkeit, dass zwei oder mehr Systeme zur gleichen Zeit senden. Auch das bedeutet nicht zwangsläufig, dass es zu einer Kollision kommt, da die Systeme auf unterschiedlichen Frequenzen senden können und sich daher nicht gegenseitig stören.
Aus diesen beiden Einzelergebnissen wird dann ein verwertbares Ergebnis, wenn man sie miteinander verheiratet.
Danach ergibt dann das folgende Bild:

Dies sieht schon deutlich freundlicher aus. Um den mehr realistischen Bereich für die Anzahl der User bis 40 besser erkennen zu können, ist hier der gleiche Plot in anderer Parametrierung dargestellt:

Fazit
Je mehr Frequenzen eine Anlage verwendet, um so sicherer ist die Übertragung. Bei einer realistischen Annahme der Useranzahl ist allerdings der Unterschied zwischen 20, 40 oder 80 Frequenzen nur noch marginal. Ferner trägt es zur Störsicherheit bei, wenn die Dauer der Einzelsendung möglichst kurz und die Wiederholrate der Sendungen niedrig ist. Allerdings gibt es hier den Trade-Off zwischen kurzen und seltenen Sendungen und der daraus resultierenden Latenzzeit. Hier müssen die Hersteller einen guten Kompromiss finden.
Die Story ist allerdings immer noch nicht zu Ende. Viele der R/C-Systeme sind sogenannte Hybrid-Systeme, die gleichzeitig FHSS und DSSS oder FEC (Forward Error Correction) machen. Beide Verfahren ermöglichen es, aus einem bis zu einer gewissen Grenze verstümmelten Signal wieder den korrekten Inhalt zu rekonstruieren. Der Einfluss dieser Verfahren wurde hier bisher nicht berücksichtigt, da die Simulation dieser Einflüsse extrem aufwändig würde und eine Anzahl nur schwer definierbarer Parameter berücksichtigt werden müsste. Um aber zumindest eine Größenordnung zu geben:
Das bedeutet, dass eine Kollision nicht unbedingt zum Verlust der Daten führt. Die oben gezeigten Ergebnisse werden dadurch noch freundlicher.
Ferner kommt hinzu, dass R/C-Systeme fehlertolerant sind. Der Verlust eines einzelnen oder auch mehrerer Datenpakete fällt im Normalfall nicht auf. Bis man Ausfälle im Steuerverhalten bemerkt, muss schon eine Menge Daten verloren gehen.
Das reale Leben zeigt, dass der gleichzeitige Betrieb vieler 2.4 GHZ-Anlagen ohne Probleme abläuft. Nur sollte man sich darüber im Klaren sein, dass es auch dafür Grenzen gibt. In Zukunft werden sich im 2.4 GHz-Band neben einer wachsenden Anzahl von R/C Anlagen immer mehr Anwendungen auch außerhalb des R/C-Bereichs einfinden. Dazu gehören nicht nur die üblichen Verdächtigen wie WiFi und Bluetooth sondern auch Skibindungen, Kaffeemaschinen oder Kühlschränke (das ist jetzt kein Witz).
Um es noch einmal gesondert zu betonen:
So und jetzt kommt das Kleingedruckte
Die obige Betrachtung gilt NICHT(!) für an Bord des Modells befindliche Sender, deren Sendetätigkeit nicht mit den Aktionen der eigentlichen Fernsteuerung synchronisiert ist und im 2.4 GHz-Band arbeiten. Dazu zählen externe Telemetriesysteme, die nicht integraler Bestandteil der Anlage sind (also z. B. im Empfänger integriert), sondern separate Telemetriesender verwenden. Einige Anlagen verwenden externe Telemetriesender, die mit dem Empfänger verbunden sind. Bei den JR-Anlagen wird der Satellitenempfänger als Telemetriesender genutzt und wird mit dem Sender synchronisiert, stellt also kein Problem dar. Beim Spektrum TM1000 war man seitens des Distributors Horizon Hobby Deutschland trotz mehrfacher Bitten nicht bereit, Auskünfte zu diesem Thema zu geben. Daher kann hier nicht bestätigt werden, dass ein TM1000 mit dem Sender synchronisiert arbeitet und daher keine Probleme auftreten können.
Systeme, die unabhängig von der R/C-Anlage operieren oder mit dieser nicht synchronisiert sind, können hier brandgefährliche Situationen schaffen. Weitere Informationen zu diesem Thema finden sich hier: http://www.rc-network.de/forum/conte...Hz-R-C-Anlagen
Ferner gilt diese Betrachtung nicht für Onboard-Videosender auf 2.4 GHz, deren Einsatz parallel zu einer 2.4 GHz R/C-Anlage ebenfalls gefährlich ist. Allerdings funktioniert in diesem Fall die Bildübertragung höchst mangelhaft. Deshalb ist diese Kombination wenig sinnvoll.
Abschließend noch ein Ausblick auf das, was möglich wäre. Bisher ist durch die Norm EN 300328 die Anzahl der möglichen Frequenzen in der Praxis auf etwa 80 begrenzt. In der neuen Version der Norm ist seitens des Bereichs R/C eingebracht und durchgesetzt worden, dass in Zukunft über 800 Frequenzen möglich sein werden. Unter der Voraussetzung, dass alle beteiligten Systeme mit 800 Frequenzen arbeiten, würde sich folgendes Bild ergeben:
Der Farbbalken an der rechten Seite zeigt die Zuordnung der Farben zu den Werten der Z-Achse (das ist die senkrechte Achse).
Betrachtet man die rechte Kante des Diagramms für 800 Frequenzen und vergleicht das mit Abbildung 3, ist es relativ egal, ob da eine oder 200 Anlagen zugange sind. Und 200 Fernsteuerungen muss man erst mal auf einem Haufen versammelt bekommen.
Ich hoffe, dass dieser Beitrag etwas Licht in das Dunkel um eines der Mysterien um 2.4 GHz bringen konnte.
Holm- und Rippenbruch
Frank Tofahrn
©DD8ED
Wie viele Anlagen gehen eigentlich gleichzeitig?
Es ist ja immer wieder die spannende Frage:
Wie viele 2.4 GHz-Systeme können eigentlich gleichzeitig an einem Ort betrieben werden?
Zu diesem Thema hat es seitens einiger Hersteller praktische Versuche gegeben. Ferner hat die praktische Erfahrung auf Flugveranstaltungen mit einer hohen Anzahl Piloten gezeigt, dass viele Anlagen gleichzeitig betrieben werden können. Diese eher phänomenologischen Ergebnisse zeigen aber nicht die Grenze auf, ab der es kritisch werden kann. Der folgende Beitrag ist der Versuch, eine qualitative Betrachtung der Grenzen des gleichzeitigen Betriebes vieler R/C-Anlagen zu liefern. Eine quantitative Antwort in der Form: „Es gehen X Anlagen gleichzeitig“ kann auch hier nicht gegeben werden, da eine dahingehende Simulation extrem aufwändig wäre und auch nicht alle denkbaren Situationen berücksichtigen könnte und somit auch unter diesem Aspekt immer unvollständig bliebe.
Ungeachtet dessen kann man sich aber mal Gedanken über qualitative Trends der gleichzeitigen Nutzbarkeit von R/C-Systemen in Abhängigkeit von der Anzahl der Anlagen und der Anzahl der genutzten Frequenzen machen. Dazu dient die im Folgenden dargestellte Betrachtung.
Zunächst die Randbedingungen, die man kennen muss, um die Ergebnisse richtig zu interpretieren:
Im Betrieb müssen sich die einzelnen Anlagen voneinander unterscheiden lassen. Die Unterscheidung erfolgt hauptsächlich in drei Bereichen:
• Der Frequency-Domain
• Der Time-Domain
• Der Code-Domain
• Der Time-Domain
• Der Code-Domain
Die Unterscheidung in der Frequency-Domain erfolgt dadurch, dass nicht alle auf der gleichen Frequenz senden. Die Unterscheidung in der Time-Domain erfolgt, indem nicht alle zur gleichen Zeit senden. Damit es zu einer Kollision zwischen 2 oder mehr Systemen kommt, müssen diese also zur gleichen Zeit auf der gleichen Frequenz senden. Da die R/C-Systeme nicht untereinander synchronisiert sind, wie z. B. DECT oder GSM, besteht jederzeit die Möglichkeit, dass solche Kollisionen auftreten. Die Unterscheidung in der Code-Domain ist bei den gängigen R/C-Systemen im Vergleich zur Time- oder Frequency-Domain relativ schwach ausgeprägt. Mehr dazu weiter unten.
Interessant ist die Antwort auf die Frage:
• Wie wahrscheinlich ist eine solche Kollision?
Bereits zu 35-MHz Zeiten gab es die Unterscheidung nach Zeit und Frequenz (gleiche Frequenz > nicht gleichzeitig fliegen, gleichzeitig fliegen > keine gleiche Frequenz). Wenn dann aber so ein Vollpfosten dabei ist, der selbst nach 20 Jahren Modellflug das Konzept der Frequenztafel nicht verstanden hat und anwenden kann, ist die Wahrscheinlichkeit einer Kollision der Funksysteme hoch.
Bei modernen 2.4 GHz-Systemen ist der Störfaktor zwischen den Ohren ausgeschaltet, da der Benutzer hier weder Einfluss auf die Sendefrequenz noch auf die Sendezeitpunkte hat. Das entscheidet die Elektronik. Im Normalfall steht für diese Entscheidung aber keine Information über das aktuelle Funkumfeld zur Verfügung, so dass hier nach mehr oder weniger starren Schemata gearbeitet werden muss, die Kollisionen nicht verhindern können. Das wird sich in Zukunft allerdings ändern.
Um die Frage nach der Kollisionswahrscheinlichkeit zumindest qualitativ beantworten zu können, müssen drei Fragen beantwortet werden:
a. Wie wahrscheinlich ist es, dass sich zwei oder mehr Systeme gleichzeitig auf einer Frequenz befinden?
b. Wie wahrscheinlich ist es, dass zwei oder mehr Systeme gleichzeitig senden?
c. Wie wahrscheinlich ist es, dass die Fälle a. und b. gleichzeitig eintreten?
Für die Antworten auf die Frage a. und b. sind folgende Voraussetzungen angenommen:
• Es wird davon ausgegangen, dass alle beteiligten Anlagen sich gegenseitig „sehen“ können, also jeder innerhalb der Funkreichweite jedes Anderen ist.
• Es wird davon ausgegangen, dass keine Methoden zur Kollisionsvermeidung ( z. B. Listen Before Talk, Adaptive Frequency Agility o.ä.) eingesetzt werden.
• Es wird davon ausgegangen, dass die verschiedenen Systeme nicht zeitlich synchronisiert sind.
• Es wird davon ausgegangen, dass die verschiedenen Systeme die gleichen Frequenzen nutzen.
• Die Betrachtung bezieht sich nur auf Frequency-Hopping-Systeme, zu denen allerdings praktisch alle vollwertigen R/C-Systeme gehören.
• Der Maßstab der Z-Achse der folgenden Plots (das ist die Senkrechte) ist rein qualitativ und auf den maximalen Wert des Ergebnisses der Simulation für den Fall a skaliert. Es ist kein absoluter Wert in %!
• Sowie einige weitere Vereinfachungen in der Simulation, die hier aber nicht weiter erläutert werden können.
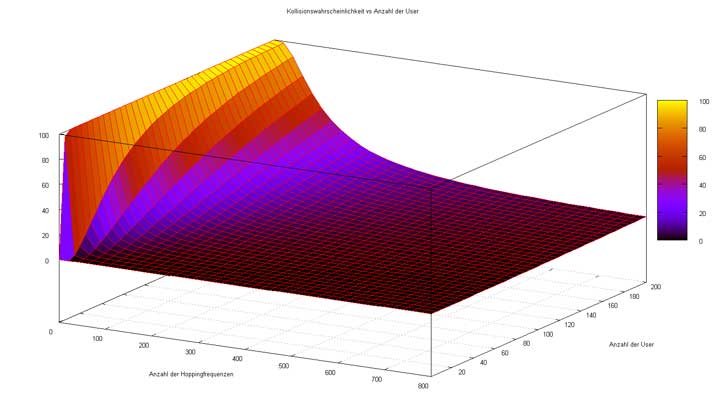
Der folgende Plot zeigt die statistischen Wahrscheinlichkeiten (in Abhängigkeit von der verwendeten Anzahl der Hoppingfrequenzen und der Anzahl User), dass sich 2 oder mehr Systeme zur gleichen Zeit auf der gleichen Frequenz befinden. Das bedeutet nicht zwangsläufig, dass es zu einer Kollision kommt, da die Verweilzeiten auf einer Frequenz typischerweise deutlich länger sind als die tatsächlichen Sendezeiten. Mehr dazu weiter unten. Dargestellt ist der Bereich für 80 Frequenzen und 200 User. Der Farbbalken an der rechten Seite (auch bei den folgenden Plots) zeigt die Zuordnung der Farben zu den Werten der Z-Achse (das ist die senkrechte Achse).• Es wird davon ausgegangen, dass keine Methoden zur Kollisionsvermeidung ( z. B. Listen Before Talk, Adaptive Frequency Agility o.ä.) eingesetzt werden.
• Es wird davon ausgegangen, dass die verschiedenen Systeme nicht zeitlich synchronisiert sind.
• Es wird davon ausgegangen, dass die verschiedenen Systeme die gleichen Frequenzen nutzen.
• Die Betrachtung bezieht sich nur auf Frequency-Hopping-Systeme, zu denen allerdings praktisch alle vollwertigen R/C-Systeme gehören.
• Der Maßstab der Z-Achse der folgenden Plots (das ist die Senkrechte) ist rein qualitativ und auf den maximalen Wert des Ergebnisses der Simulation für den Fall a skaliert. Es ist kein absoluter Wert in %!
• Sowie einige weitere Vereinfachungen in der Simulation, die hier aber nicht weiter erläutert werden können.
Wie aus dem Plot ersichtlich, ist die Wahrscheinlichkeit bei einer geringen Anzahl von Usern gering. Ebenso trägt eine hohe Anzahl von Hoppingfrequenzen dazu bei, die Wahrscheinlichkeit zu reduzieren. Bei nur 2 Usern (das ist die vordere Kante des Diagramms), also 2 gleichzeitig betriebenen Anlagen, wäre man mit 10 Frequenzen schon ganz gut bedient. Eine Erhöhung der Anzahl der Frequenzen bringt hier nur noch marginale Vorteile. Steigt bei 2 Frequenzen die Anzahl der User auf 8, ist man schon in dem Bereich, in dem die Anzahl der potentiellen Kollisionen kritisch werden kann. Nutzt das System 80 Frequenzen, was z. Z. das aus regulativen Gründen nutzbare Maximum darstellt, sieht die Situation schon freundlicher aus. Die Quintessenz aus dieser Betrachtung ist eine gar einfache und kommt nicht völlig überraschend:
Je mehr Frequenzen genutzt werden, um so besser!
Allerdings ist das nicht die ganze Story. Es fehlt noch die Antwort auf die Frage b.
Typischerweise senden Frequency-Hopper nur einen Bruchteil der Zeit, die sie auf einer Frequenz verbringen. Das bedeutet, dass obwohl 2 oder mehr Systeme zur gleichen Zeit auf der gleichen Frequenz sind, diese Frequenz für einen Teil der Zeit störungsfrei genutzt werden kann, obwohl andere Systeme die Frequenz dadurch belegen, dass sie dort „parken“.
Bei der bisherigen Betrachtung weiter oben wurde die Wahrscheinlichkeit betrachtet, dass 2 oder mehr Systeme zur gleichen Zeit auf der gleichen Frequenz rumlungern, unabhängig davon, ob sie gerade senden oder Däumchen drehen. Will man jetzt noch die Däumchendrehzeit in die Betrachtung mit einbeziehen, muss eine zusätzliche Betrachtung angestellt werden.
Es geht um das unendliche Thema: „Unkoordinierter Vielfachzugriff auf die Resource Frequenzspektrum“. R/C-Anlagen arbeiten hier typischerweise nach dem ALOHA-Verfahren (vollkommen richtig, das kommt aus Hawai). Da es jetzt etwas aufwändig wäre, alle aktuellen Systeme hinsichtlich ihres Verhaltens in einem ALOHA-Umfeld gegeneinander zu prüfen, wurde aus den Betriebsparametern einiger aktueller Systeme ein „Durchschnitts-System“ gebildet, das zur weiteren Betrachtung herangezogen werden soll. Berechnet wird die Wahrscheinichkeit, dass zwei oder mehr Systeme zur gleichen Zeit senden. Auch das bedeutet nicht zwangsläufig, dass es zu einer Kollision kommt, da die Systeme auf unterschiedlichen Frequenzen senden können und sich daher nicht gegenseitig stören.
Aus diesen beiden Einzelergebnissen wird dann ein verwertbares Ergebnis, wenn man sie miteinander verheiratet.
Danach ergibt dann das folgende Bild:
Dies sieht schon deutlich freundlicher aus. Um den mehr realistischen Bereich für die Anzahl der User bis 40 besser erkennen zu können, ist hier der gleiche Plot in anderer Parametrierung dargestellt:
Fazit
Je mehr Frequenzen eine Anlage verwendet, um so sicherer ist die Übertragung. Bei einer realistischen Annahme der Useranzahl ist allerdings der Unterschied zwischen 20, 40 oder 80 Frequenzen nur noch marginal. Ferner trägt es zur Störsicherheit bei, wenn die Dauer der Einzelsendung möglichst kurz und die Wiederholrate der Sendungen niedrig ist. Allerdings gibt es hier den Trade-Off zwischen kurzen und seltenen Sendungen und der daraus resultierenden Latenzzeit. Hier müssen die Hersteller einen guten Kompromiss finden.
Die Story ist allerdings immer noch nicht zu Ende. Viele der R/C-Systeme sind sogenannte Hybrid-Systeme, die gleichzeitig FHSS und DSSS oder FEC (Forward Error Correction) machen. Beide Verfahren ermöglichen es, aus einem bis zu einer gewissen Grenze verstümmelten Signal wieder den korrekten Inhalt zu rekonstruieren. Der Einfluss dieser Verfahren wurde hier bisher nicht berücksichtigt, da die Simulation dieser Einflüsse extrem aufwändig würde und eine Anzahl nur schwer definierbarer Parameter berücksichtigt werden müsste. Um aber zumindest eine Größenordnung zu geben:
Es gibt Systeme, bei denen ein Störer 10 mal stärker wie das Nutzsignal sein kann, und der Steuerbefehl trotzdem unbeschadet rüber kommt.
Das bedeutet, dass eine Kollision nicht unbedingt zum Verlust der Daten führt. Die oben gezeigten Ergebnisse werden dadurch noch freundlicher.
Ferner kommt hinzu, dass R/C-Systeme fehlertolerant sind. Der Verlust eines einzelnen oder auch mehrerer Datenpakete fällt im Normalfall nicht auf. Bis man Ausfälle im Steuerverhalten bemerkt, muss schon eine Menge Daten verloren gehen.
Das reale Leben zeigt, dass der gleichzeitige Betrieb vieler 2.4 GHZ-Anlagen ohne Probleme abläuft. Nur sollte man sich darüber im Klaren sein, dass es auch dafür Grenzen gibt. In Zukunft werden sich im 2.4 GHz-Band neben einer wachsenden Anzahl von R/C Anlagen immer mehr Anwendungen auch außerhalb des R/C-Bereichs einfinden. Dazu gehören nicht nur die üblichen Verdächtigen wie WiFi und Bluetooth sondern auch Skibindungen, Kaffeemaschinen oder Kühlschränke (das ist jetzt kein Witz).
Um es noch einmal gesondert zu betonen:
Die hier gezeigten Ergebnisse beruhen auf der Annahme von Betriebsparametern einer „Durchschnittsanlage“, die es so in der Realität nicht gibt, aber den Parametern vieler Anlagen zumindest nahe kommt. Die Ergebnisse sollen einen qualitativen Trend aufzeigen und sind nicht als quantitativ exakte Werte aufzufassen. Durch Variation der Eingangsparameter können sich deutlich andere Werte ergeben. Man kann aber abschätzen, dass die Form der gezeigten Diagramme annähernd erhalten bleibt, solange man sich im Bereich realistischer Eingangsparameter bewegt. Der zu erwartende Einfluss einer geänderten Parametrierung wird der sein, dass sich das ganze Diagramm in der Z-Achse (also nach oben oder unten) bewegt.
So und jetzt kommt das Kleingedruckte
Die obige Betrachtung gilt NICHT(!) für an Bord des Modells befindliche Sender, deren Sendetätigkeit nicht mit den Aktionen der eigentlichen Fernsteuerung synchronisiert ist und im 2.4 GHz-Band arbeiten. Dazu zählen externe Telemetriesysteme, die nicht integraler Bestandteil der Anlage sind (also z. B. im Empfänger integriert), sondern separate Telemetriesender verwenden. Einige Anlagen verwenden externe Telemetriesender, die mit dem Empfänger verbunden sind. Bei den JR-Anlagen wird der Satellitenempfänger als Telemetriesender genutzt und wird mit dem Sender synchronisiert, stellt also kein Problem dar. Beim Spektrum TM1000 war man seitens des Distributors Horizon Hobby Deutschland trotz mehrfacher Bitten nicht bereit, Auskünfte zu diesem Thema zu geben. Daher kann hier nicht bestätigt werden, dass ein TM1000 mit dem Sender synchronisiert arbeitet und daher keine Probleme auftreten können.
Systeme, die unabhängig von der R/C-Anlage operieren oder mit dieser nicht synchronisiert sind, können hier brandgefährliche Situationen schaffen. Weitere Informationen zu diesem Thema finden sich hier: http://www.rc-network.de/forum/conte...Hz-R-C-Anlagen
Ferner gilt diese Betrachtung nicht für Onboard-Videosender auf 2.4 GHz, deren Einsatz parallel zu einer 2.4 GHz R/C-Anlage ebenfalls gefährlich ist. Allerdings funktioniert in diesem Fall die Bildübertragung höchst mangelhaft. Deshalb ist diese Kombination wenig sinnvoll.
Abschließend noch ein Ausblick auf das, was möglich wäre. Bisher ist durch die Norm EN 300328 die Anzahl der möglichen Frequenzen in der Praxis auf etwa 80 begrenzt. In der neuen Version der Norm ist seitens des Bereichs R/C eingebracht und durchgesetzt worden, dass in Zukunft über 800 Frequenzen möglich sein werden. Unter der Voraussetzung, dass alle beteiligten Systeme mit 800 Frequenzen arbeiten, würde sich folgendes Bild ergeben:
Der Farbbalken an der rechten Seite zeigt die Zuordnung der Farben zu den Werten der Z-Achse (das ist die senkrechte Achse).
Betrachtet man die rechte Kante des Diagramms für 800 Frequenzen und vergleicht das mit Abbildung 3, ist es relativ egal, ob da eine oder 200 Anlagen zugange sind. Und 200 Fernsteuerungen muss man erst mal auf einem Haufen versammelt bekommen.
Ich hoffe, dass dieser Beitrag etwas Licht in das Dunkel um eines der Mysterien um 2.4 GHz bringen konnte.
Holm- und Rippenbruch
Frank Tofahrn
©DD8ED